

AI Lab、大阪大学大学院基礎工学研究科と共同で、1人のオペレーターが15体のアバターロボットを遠隔運用する施設案内実験を開始
最終更新日:2026/03/12
 AI Lab ロボット 施設案内
AI Lab ロボット 施設案内
サイバーエージェント内の研究開発組織「AI Lab」は、大阪大学大学院基礎工学研究科と共同で、1人のオペレーターが15体のアバターロボットを遠隔制御し、大規模商業施設内で施設案内を行う実証実験を実施しました。
このニュースのポイント
- AI Labが、大阪大学大学院基礎工学研究科と共同で大規模商業施設内でのロボット案内の実証実験を実施
- 実験では、1人のオペレーターが15体のアバターロボットを遠隔制御
- オペレーターが現地に赴くことなく、詳細な最新情報を設置型自律接客アバター案内に反映する運用の実現を目指す
株式会社サイバーエージェント内の研究開発組織「AI Lab」は、2026年2月21日(金)から3月8日(日)の期間に、大規模商業施設である大阪南港ATCへ15体のロボットを投入し、1人のオペレーターが遠隔制御を行い施設案内を行う実証実験を行いました。
本実験は、大阪大学大学院基礎工学研究科の先端知能システム(サイバーエージェント)共同研究講座と、ムーンショット型研究開発事業の一環として実施。広大かつ複雑な施設環境において、アバターロボットが膨大な案内マニュアルや日々変化する施設情報を踏まえ、きめ細やかな案内の可否を検証しました。
近年、少子高齢化に伴う労働力不足が深刻化しています。内閣府主導の「ムーンショット型研究開発事業」では、人が身体・脳・空間・時間の制約から解放される社会の実現を目標に掲げています。
「AI Lab」と大阪大学大学院基礎工学研究科の先端知能システム(サイバーエージェント)共同研究講座では、同事業の一環として「遠隔ロボットで働く」をテーマに実証実験を継続。これまでの実証実験では、5体の設置型アバターを1人のオペレーターが直接操作し、生産性向上や業務効率化の可能性を検証してきました。
本実験では、その発展として自律制御で動作する15体の自律接客アバター(設置型10体・移動型5体)を設置。アバターの振る舞いを1人のオペレーターが統合的に遠隔制御することで、接客のパフォーマンスを大幅に拡張できるかを検証しました。
具体的には、大規模言語モデルを基盤とした制御方式を採用したアバターが、実環境における実践的な施設案内サービスを提供できるかを検証。大阪南港ATCの広大な敷地内に分散配置されたアバターは、テナント店舗や展示イベント情報、施設設備の詳細案内や道案内など、多岐にわたる案内業務を担います。
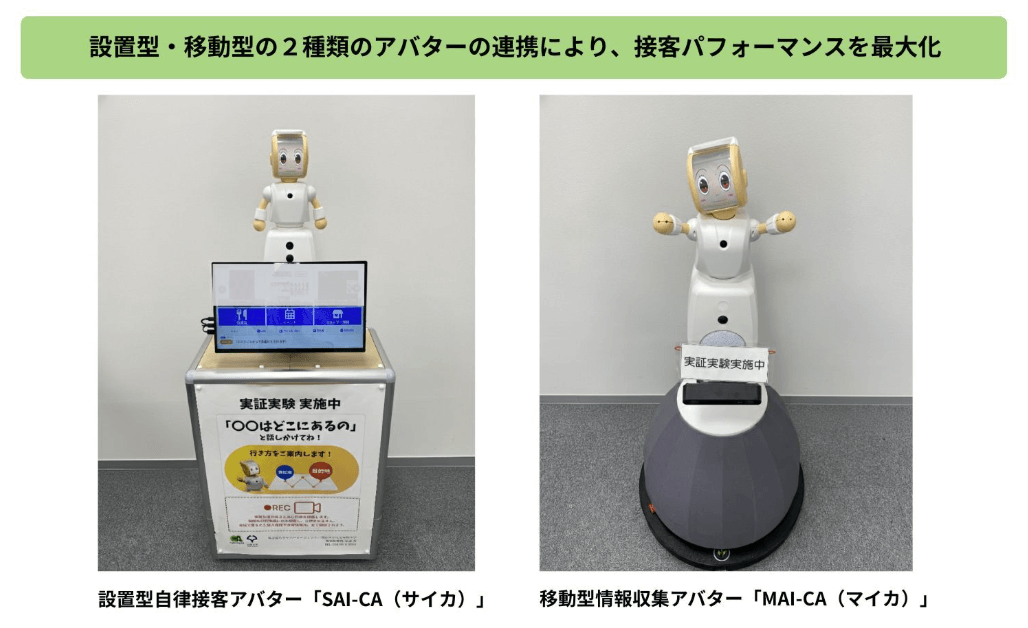
本実証では、2種類のアバターである設置型自律接客アバター「SAI-CA(サイカ)」と移動型情報収集アバター「MAI-CA(マイカ)」を使用しました。
移動型情報収集アバターが、現地を巡回して収集した最新の施設情報や状況変化を、遠隔地にいるオペレーターが即座に把握・整理。現地にオペレーターが赴くことなく、詳細な最新情報を設置型自律接客アバターの案内に反映する運用の実現を目指します。
AI Labは、本プロジェクトで蓄積した知見を広く共有し、実社会におけるロボット活用の可能性を広げるとともに、速やかな社会実装に貢献します。今後も、共同研究講座における実証を通じて得た知見をもとに、ロボットによる遠隔対話の研究を推進し、実用化に向けた取り組みを加速します。
DXトレンドマガジン
メールマガジン登録
業務の課題解決に繋がる最新DX・情報をお届けいたします。
メールマガジンの配信をご希望の方は、下記フォームよりご登録ください。登録無料です。


AI・人工知能記事カテゴリ一覧
AI・人工知能サービス
- AIエージェント
- LLM
- AI研究開発
- ChatGPT
- 画像生成AI
- 生成AI
- RAG
- DX推進
- おすすめAI企業
- チャットボット
- ボイスボット
- 音声認識・翻訳・通訳
- 画像認識・画像解析
- 顔認証
- AI-OCR
- 外観検査
- 異常検知・予知保全
- 自然言語処理-NLP-
- 検索システム
- 感情認識・感情解析
- AIモデル作成
- 需要予測・ダイナミックプライシング
- AI人材育成・教育
- アノテーション
- AI学習データ作成
- エッジAI
- IoT
- JDLA
- G検定
- E資格
- PoC検証
- RPAツール
- Salesforce Einstein
- Watson(ワトソン)
- Web接客ツール
- サプライチェーン
- メタバース
- AR・VR・デジタルツイン
- MI
- スマートファクトリー
- データ活用・分析
- 機械学習
- ディープラーニング
- 強化学習
- テレワーク・リモートワーク
- マーケテイングオートメーション・MAツール
- マッチング
- レコメンド
- ロボット
- 予測
- 広告・クリエイティブ
- 営業支援・インサイドセールス
- 省人化
- 議事録自動作成
- 配送ルート最適化
- 非接触AI
業態業種別AI導入活用事例
今注目のカテゴリー
ChatGPT連携サービス
チャットボット
AI-OCR
生成AI
ChatGPT連携サービス
チャットボット
AI-OCR





FOLLOW US
SNSをフォローして、最新情報をチェックできます!
清水建設、鉄筋の加工・組立作業に「フィジカルAI」導入。スイスM…

クラダシ「Claude」を全社展開。特有業務の自動化の推進および…

Sakana AI、マルチエージェント基盤「Sakana Fug…
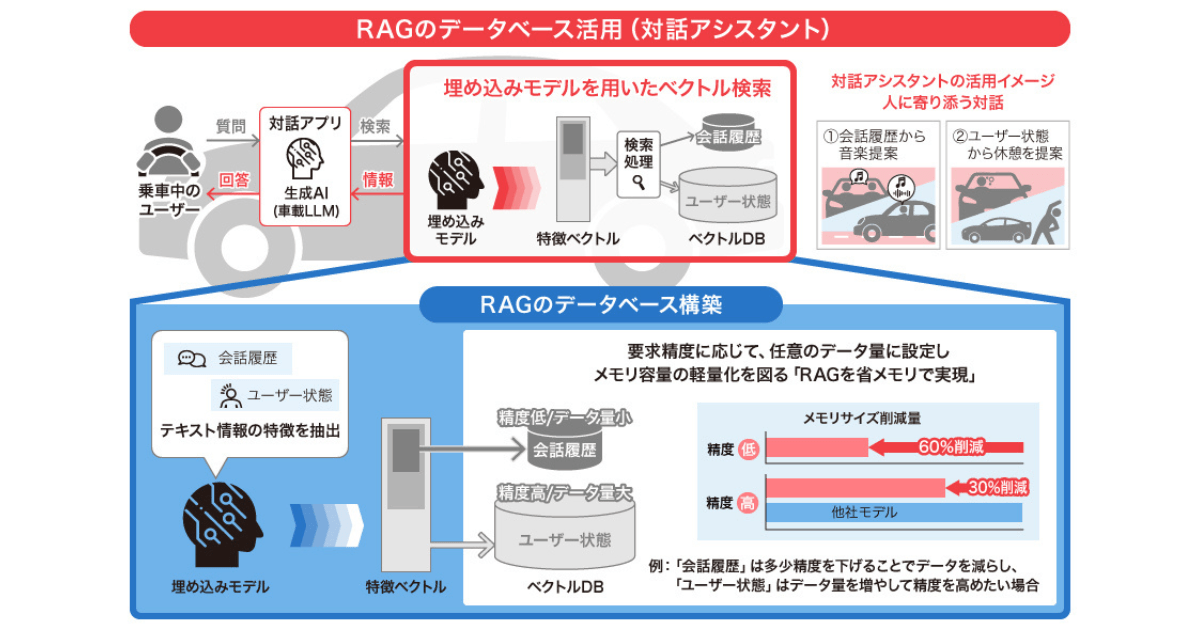
デンソーテン、独自の埋め込みモデル学習技術により車載エッジでRA…
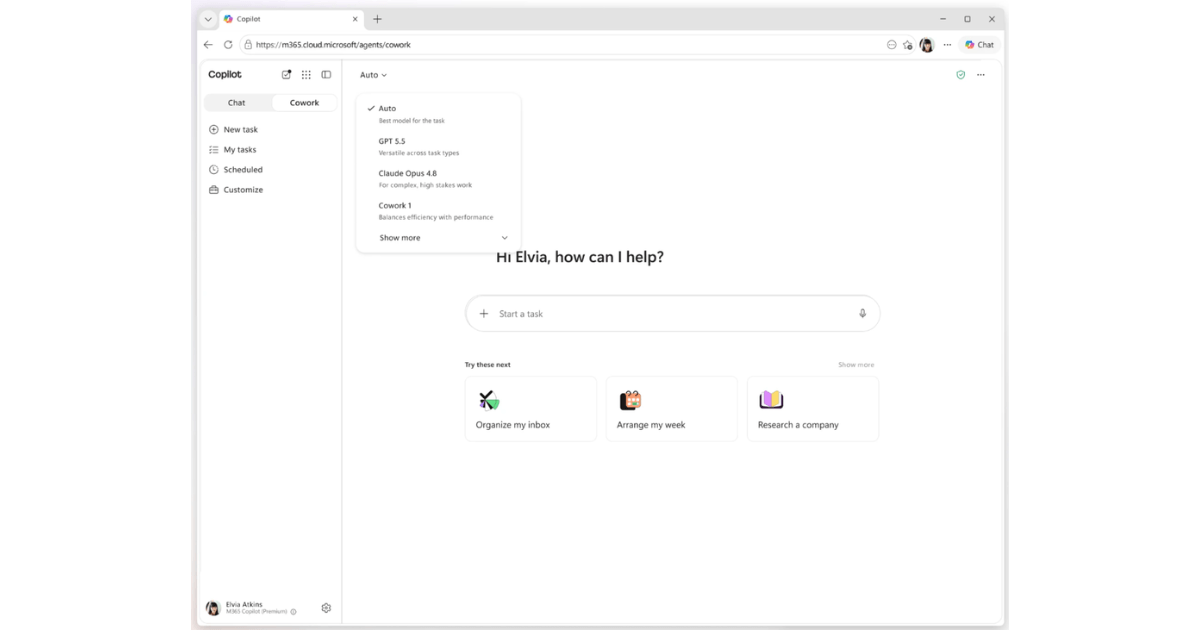
Microsoft、「Copilot Cowork」一般提供を開始。「Claude Cowork」より平均30〜40%低コスト
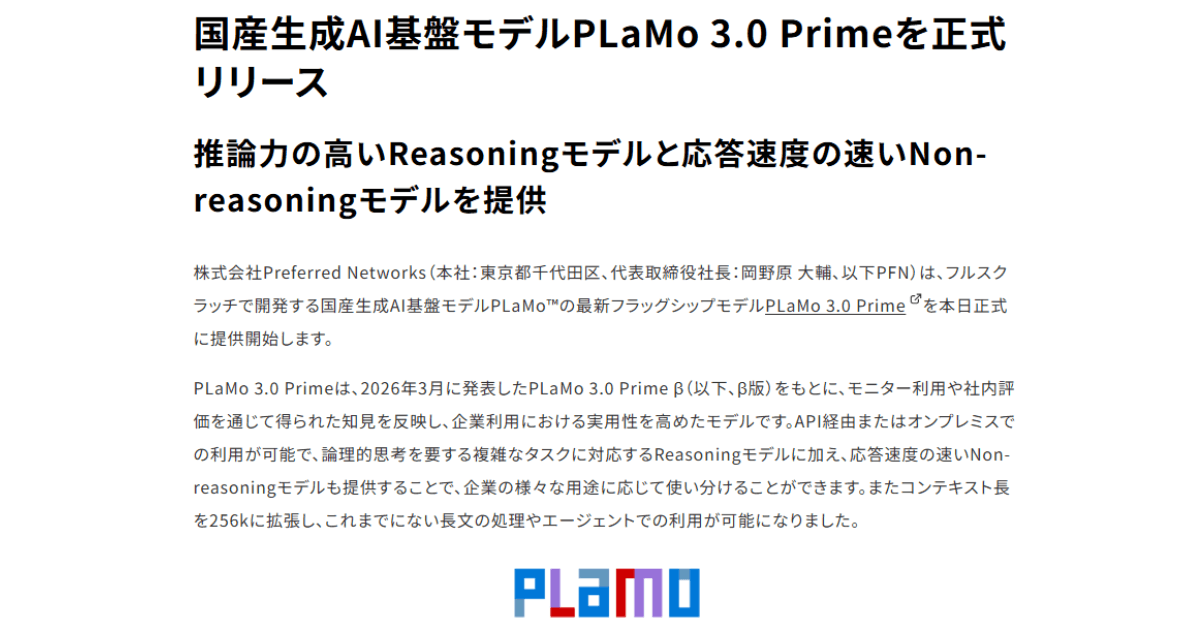
Preferred Networks、国産生成AI基盤モデル「PLaMo 3.0 Prime」を正式提供開始。

CopilotとChatGPTの違いとは?料金・機能・選び方を徹底比較

Genki Global Dining Concepts、全生け簀へのAI給餌機導入で国産真鯛の安定供給を強化
三菱重工とPFNが業務提携。ミッションクリティカル領域の国産AI技術の共同開発へ

Copilot Notebookとは?使い方・料金・NotebookLMとの違いを解説
AI製品・ソリューションの掲載を
希望される企業様はこちら