

協働ロボットとは?産業用ロボットとの違い・最新規格・導入事例
最終更新日:2026/06/29
「自動化を進めたいが、安全柵を置くスペースがない」「ロボットを操作できる専任のエンジニアがいない」——そんな製造現場の悩みを解決する切り札として注目されているのが「協働ロボット(コボット)」です。
人手不足や熟練作業者の高齢化が深刻化する中、安全基準を満たせば「安全柵なし」で人のすぐ隣に設置できる協働ロボットは、これまで導入を諦めていた中小規模の工場にも大きなメリットをもたらします。
協働ロボットとは
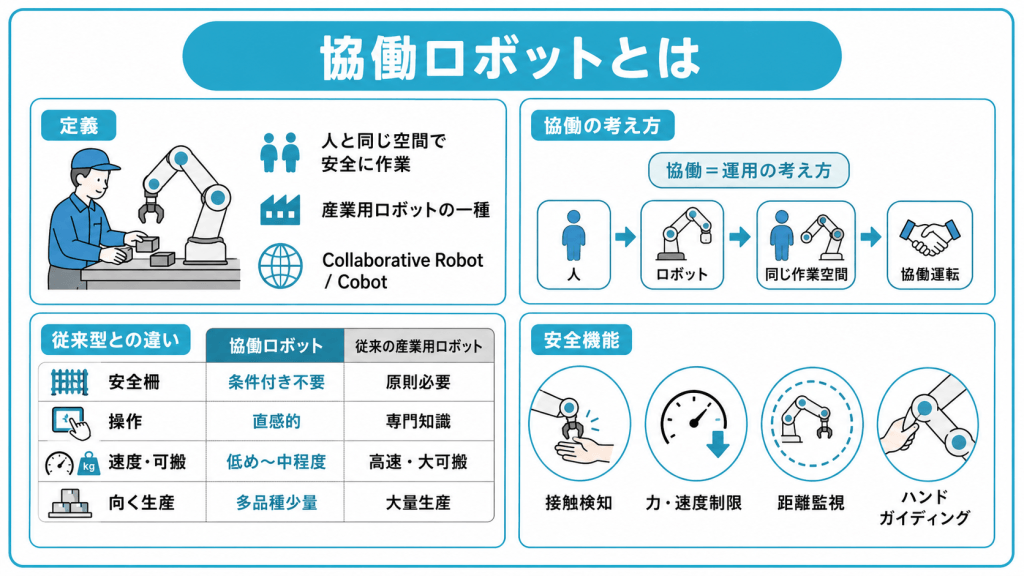
協働ロボットとは、人と作業空間を共有しながら安全に作業できるように設計された産業用ロボットです。
英語では「Collaborative Robot」と呼ばれ、「Cobot(コボット)」と略されることもあります。リスクアセスメントなどの条件を満たせば、安全柵で人と隔離しなくても作業者のすぐ隣で動かせる点が、従来の産業用ロボットとの大きな違いです。
なお、規格上は協働ロボットも産業用ロボットの一種にあたります。本記事で「産業用ロボットとの違い」を扱う際は、安全柵を備えた従来型の産業用ロボットとの比較を指しています。
協働ロボットの定義と協働運転の考え方
正しく理解するうえで重要なのは、ロボットの形状ではなく協働運転という運用の考え方です。ロボットの用語を定めた日本産業規格JIS B 0134(国際規格ISO 8373に対応)では、協働運転を「協働ロボットが定められた作業空間で人と直接協力して作業を行う状態」と定義しています。
つまり「協働」という言葉は、ロボット本体の種類というよりも、人とロボットが同じ空間で一緒に働くという運用形態を表しています。協働ロボットは、協働運転を安全に行うためのロボットなのです。
なお、四足歩行ロボットやヒューマノイドロボット、配膳ロボットや受付ロボットなどは、人の近くで動く点では似ていても、産業用ロボットの安全規格が対象とする協働ロボットとは別のカテゴリーに分類されます。
協働ロボット(コボット)を検討する際には、人と同じ作業空間で産業用タスクを担うロボットアーム(双腕型なども含む)と認識することで、対象を明確にできます。
参考:JIS B 0134:2024『ロボティクス-用語』(ISO 8373:2021対応)
協働ロボットと産業用ロボットの違い
協働ロボットと従来の産業用ロボットは、安全柵の要否・操作のしやすさ・可搬重量・得意な生産形態の4点で大きく異なります。両者は得意な現場が異なるため、違いを把握したうえで使い分けることが重要です。
| 比較項目 | 協働ロボット | 従来の産業用ロボット |
|---|---|---|
| 安全柵 | 条件を満たせば不要 | 原則として必要 |
| 設置スペース | 省スペースで設置できる | 安全柵を含む広い空間が必要 |
| 操作・プログラミング | ダイレクトティーチングなど直感的 | 専門的なプログラミング知識が必要 |
| 可搬重量・動作速度 | 数kg〜30kg程度が中心(一部に50kg級・高速タイプあり)・低速寄り | 大可搬・高速動作が可能 |
| 得意な生産形態 | 多品種少量生産・工程変更が多い現場 | 大量生産・定型的な高速作業 |
| 導入コスト | 比較的抑えやすい | 周辺設備を含め高額になりやすい |
最も分かりやすい違いは安全柵の要否です。従来の産業用ロボットは高速かつ強い力で動作するため、人と隔離するための安全柵が必要でした。
これに対し協働ロボットは、人との接触時に安全に停止する機能を備えており、リスクアセスメントなどの条件を満たせば安全柵なしで設置できます。
操作面では、ロボットアームを手で動かして動作を覚えさせるダイレクトティーチングなどに対応し、専門の技術者でなくても設定しやすくなっています。
一方で可搬重量や動作速度は安全のために抑えられており、一般的には数kg〜30kg程度が中心です。一部に最大50kg級の高可搬モデルや、生産性を高めた高速タイプもありますが、いずれも協働作業時にはリスクアセスメントに応じた速度・力の制限が必要です。
大量生産を高速でこなす用途では従来の産業用ロボットのほうが適しており、両者は対立するものではなく、作業に応じて使い分ける関係です。
協働ロボットを支える安全機能の仕組み
協働ロボットが安全柵なしで人のそばで使えるのは、接触によるリスクを抑える複数の安全機能を備えているためです。これらの機能が組み合わさることで、万一人と接触しても重大な事故になりにくい設計が実現しています。
代表的な機能が、関節トルクやモーター電流、力覚センサーなどを用いた接触・過負荷の検知です。ロボットが人やものに触れて想定以上の力を感知すると、自動的に動作を停止します。
あわせて、動作速度の制限や、出力そのものを抑える設計も採用されており、接触した場合の衝撃を小さく抑えられます。
さらに、人との距離を監視して接近時に減速・停止する機能や、ロボットアームを直接手で導いて操作するハンドガイディングなども、安全に協働するための仕組みです。ただし、こうした機能が備わっていても、設置環境や扱うワーク(加工対象物)によって危険性は変わります。
協働ロボットが普及してきた背景
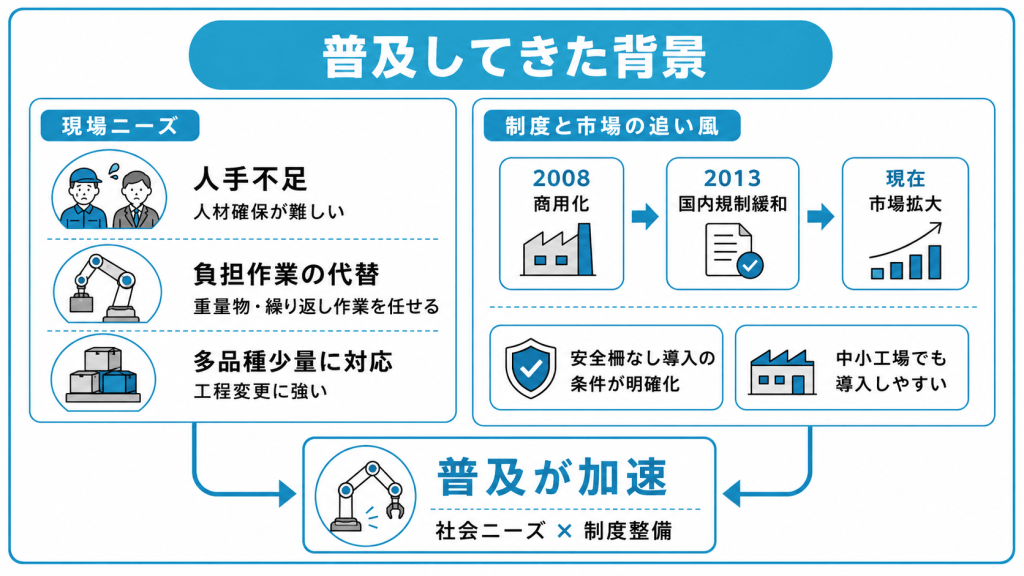
協働ロボットの導入がここまで広がった背景には、製造業を取り巻く環境の変化と、法律・規格の見直しという2つの要因があります。技術の進歩だけでなく、社会的なニーズと制度の後押しが重なったことで普及が加速しました。
人手不足と多品種少量生産への対応
協働ロボットが求められる最大の理由は、深刻化する人手不足と、生産現場に求められる柔軟性の高まりです。少子高齢化によって製造現場で働く若年層が減少し、肉体的な負担の大きい作業を担う人材の確保が難しくなっています。
協働ロボットは、こうした単純作業や負担の大きい作業を人に代わって担い、限られた人員でも生産を維持しやすくします。重量物の持ち上げや繰り返し作業をロボットに任せることで、作業者の負担を減らし、より付加価値の高い作業に人を振り向けられます。
加えて、消費者ニーズの多様化により、少ない数量で多くの種類を生産する多品種少量生産が増えています。
協働ロボットは小型で省スペースに設置でき、レイアウト変更や工程の切り替えにも対応しやすいため、こうした変化の多い生産形態と相性が良いといえます。
人手不足の解消と生産体制の柔軟性向上という二つの要求に同時に応えられる点が、協働ロボットの普及を支えています。
規制緩和と市場規模の拡大
協働ロボットの国内普及を後押ししたのが、2013年(平成25年)の規制緩和です。労働安全衛生規則第150条の4により、産業用ロボットが人と同じ作業空間で動く場合は、安全柵などの防護措置が求められてきました。
2013年12月に厚生労働省から出された通達(基発1224第2号)により、ISO 10218などの国際規格が定める安全要求を満たし、リスクアセスメントで人への危険がないことが確認できれば、安全柵なしで人と同じ空間にロボットを設置できるようになりました。この規制緩和により、広いスペースを確保しにくい中小規模の工場でも導入が進みました。
世界的に見ても、2008年にデンマークのユニバーサルロボットが商用の協働ロボットを発売して以降、市場は拡大を続けています。
協働ロボット市場については、矢野経済研究所など複数の調査機関が、今後も成長が続くと予測しています。
ただし、具体的な市場規模(台数や金額)の数値は、調査機関や調査時期によって異なるため、最新かつ信頼できる情報については、各調査機関の最新レポートを直接ご確認ください。
参考:厚生労働省「産業用ロボットと人との協働作業が可能となる安全基準を明確化しました」/矢野経済研究所「協働ロボット世界市場に関する調査を実施(2024年)」
協働ロボットでできること・できないこと
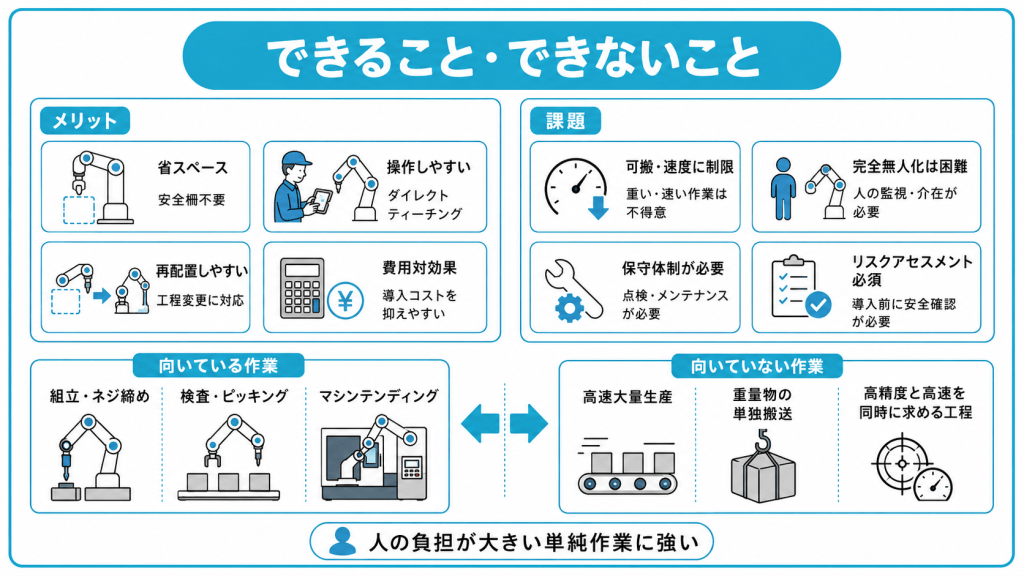
協働ロボットは万能の機械ではなく、得意な作業と不得意な作業がはっきり分かれます。導入してから「想定していた使い方ができなかった」とならないよう、メリットと課題の両面を理解しておくことが大切です。
協働ロボット導入のメリット
主なメリットは、省スペース性・操作のしやすさ・柔軟性・費用対効果の4点です。
- 安全柵が不要で省スペースに設置できる
- 専門知識がなくても操作可能
- 工程変更や再配置に対応しやすい
- 産業用ロボットより低コストで導入できる
省スペース性は、安全柵が不要であることから生まれるメリットです。柵の設置が不要なため、既存ラインのわずかな空きや、敷地に余裕がない工場でも無理なく導入できます。
操作のしやすさも大きな利点です。ダイレクトティーチングなどによって、専門の技術者でなくても現場の作業者が動作を設定でき、教育の負担を抑えられます。
さらに、1台のロボットを工程に応じて再配置・再設定できるので、多品種少量生産にも柔軟に対応できます。費用面でも、本体価格や周辺設備のコストが従来の産業用ロボットより抑えやすく、人件費の削減効果とあわせて費用対効果を見込めます。
導入前に押さえておきたい課題・デメリット
協働ロボットには、可搬重量や速度の制限・保守体制・安全評価の負担といった課題もあります。
- 可搬重量や動作速度に制限がある
- 単体での完全な無人化には向いていない
- 保守・メンテナンス体制が必要になる
- リスクアセスメントの実施が欠かせない
可搬重量と速度の制限は、安全のための設計に由来します。人との接触リスクを抑えるために出力や速度が抑えられているため、重量物の搬送や高速・大量の生産には不向きです。
また、協働ロボットは人の作業を補助・代替する用途で使われることが多い一方、単体で工場全体を無人化するための装置ではありません。完全な無人化を目指すなら、周辺設備や搬送装置、画像処理システム、安全防護策、従来型の産業用ロボットなどとの組み合わせが必要になります。
運用面では、安定して稼働させるために定期的な保守やメンテナンスの体制が必要です。
さらに、安全柵がない分、設置する作業や環境に応じてリスクアセスメントを実施し、危険がないことを確認する作業が欠かせません。
これらの課題は導入を妨げるものではなく、コストや体制の検討にあらかじめ含めておくことが重要です。
協働ロボットが向いている作業・向いていない作業
協働ロボットは「人の負担が大きい単純作業」や「多品種少量の工程」に向いていますが、「大量生産の高速作業」には向いていません。
| 向いている作業 | 向いていない作業 |
|---|---|
| 組立・ネジ締めなど人の作業の補助 | 高速・大量の定型生産 |
| 検査・ピッキングなど多品種への対応 | 重量物の単独搬送 |
| マシンテンディング(機械への着脱) | 高い精度と高速動作を同時に求める工程 |
向いている作業は、人の手作業を補助・代替できる工程です。組立やネジ締め・検査・機械へのワークの着脱などは、協働ロボットの安全性と柔軟性を活かしやすい用途です。
これらは作業者の負担が大きかったり、人手の確保が難しかったりする工程であることが多く、導入の効果を実感しやすい領域です。
一方、向いていない作業は、速度や可搬重量で協働ロボットの設計上の制限が壁になる工程です。高速で大量に同じ製品を生産するラインや、重量物を単独で扱う搬送作業では、従来の産業用ロボットや専用設備のほうが適しています。
協働ロボットの安全規格とリスクアセスメント
協働ロボットは高度な安全機能を備えていますが、設置するだけで無条件に安全が担保されるわけではありません。
協働ロボットに関わる主な安全規格
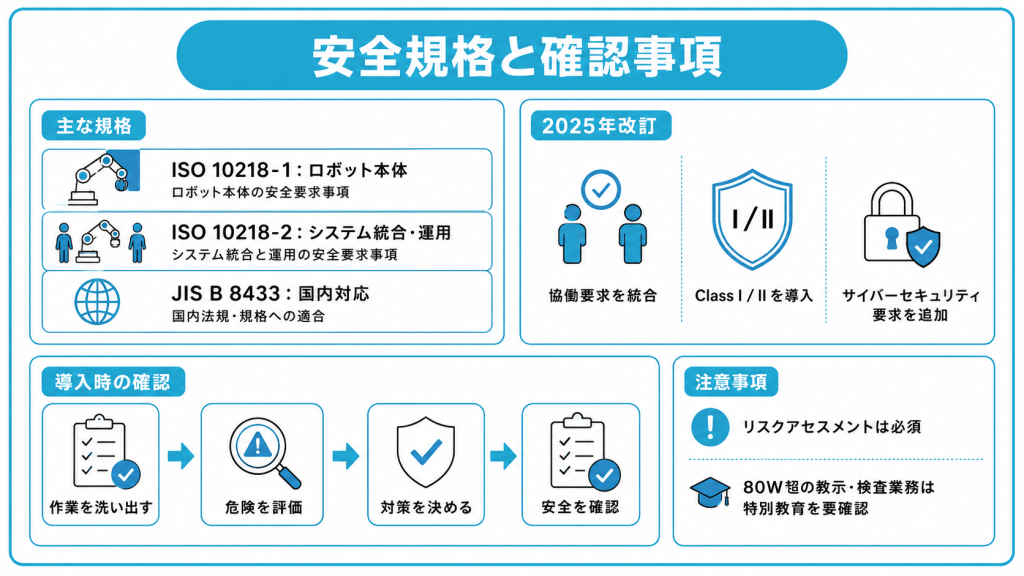
協働ロボットの安全は、国際規格のISO 10218シリーズと、それを補完してきたISO/TS 15066:2016を中心に定められてきました。ロボット本体からアプリケーション・統合まで、設計・導入・運用にわたる安全要求をまとめた規格群です。
ISO 10218-1は産業用ロボットそのものの安全要求を、ISO 10218-2はロボットアプリケーションやロボットセルの統合・運用に関する安全要求を定めています。ISO/TS 15066:2016は、人とロボットが協働して作業する際の安全要求をより具体的に定めた技術仕様書として位置づけられてきました。
国内では、ISO 10218-1:2011に対応するJIS B 8433-1:2015、ISO 10218-2:2011に対応するJIS B 8433-2:2015などが整備されています。
協働ロボットを安全柵なしで導入するには、こうした規格を満たすのが前提です。規格は専門的な内容を含むため、実際の導入にあたってはメーカーやシステムインテグレーターと連携しながら確認を進めていきます。
安全規格の最新動向
協働ロボットの導入を検討される際は、2025年に大幅に改訂された最新の安全規格の確認が不可欠です。
2025年2月に、ISO 10218-1:2025(Edition 3)とISO 10218-2:2025(Edition 2)が発行され、2011年版を置き換えました。今回の改訂で大きいのは、これまでISO/TS 15066:2016で扱われていた協働ロボットアプリケーションの安全要求が、ISO 10218シリーズに組み込まれた点です。
これにより、産業用ロボットと協働作業の安全要求が一つの規格体系のなかで扱えるようになりました。また、ISO 10218-1:2025ではClass I/Class IIの分類が導入されました。マニピュレータの総質量、最大力、最大速度などに応じて、求められる安全方策の水準を判断する考え方が示されています。
あわせて、ISO 10218-2:2025では、産業用ロボットの安全に関係するサイバーセキュリティ要求も新たに加えられました。
参考:ISO 10218-1:2025、ISO 10218-2:2025
導入時に必要なリスクアセスメントと特別教育
協働ロボットでもリスクアセスメントは必須であり、作業内容や設置するロボットによっては労働安全衛生法に基づく特別教育の対象になる場合があります。
リスクアセスメントとは、設置する作業や環境にどのような危険があるかを洗い出し、対策を講じる手順を指します。協働ロボットを安全柵なしで導入するには、このリスクアセスメントによって人への危険がないことを確認することが前提となります。安全機能を備えたロボットであっても、扱うワークや作業内容によって危険性は変わるため、評価を省くことはできません。
特別教育については、対象となる「産業用ロボット」が法令上、定格出力が80Wを超えるものを前提に扱われます。労働安全衛生規則第36条第31号・第32号により、こうした産業用ロボットの教示等の業務や検査等の業務に労働者を就かせる場合は、事業者には特別教育を行う義務があります。
協働作業ができるロボットであっても、教示や検査の作業内容、可動範囲内で行う作業の有無によっては特別教育の対象となります。
一律に不要と判断せず、導入するロボットの仕様や運用方法をもとに、メーカーや専門機関に確認しながら対応を決めることが安全につながります。
参考:厚生労働省「産業用ロボットと人との協働作業が可能となる安全基準を明確化しました」 / 日本ロボット工業会「産業用ロボット特別教育」
協働ロボットの主な用途と導入事例
協働ロボットは、組立から検査、搬送まで幅広い工程で使われています。
協働ロボットの代表的な用途
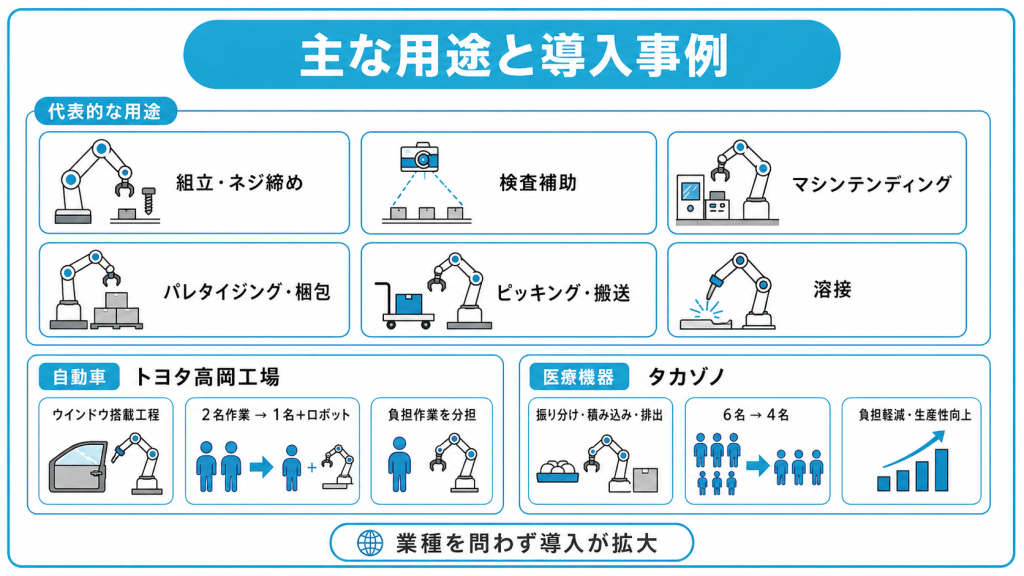
協働ロボットは、人の手作業を補助・代替できる工程で幅広く活用されています。特定の用途に限定されず、現場の課題に応じてさまざまな作業に使われている点が特徴です。
- 部品の組立・ネジ締め
- 外観検査・寸法測定の補助
- マシンテンディング(機械への着脱)
- パレタイジング・梱包
- ピッキング・搬送
- 溶接(アーク溶接など)
組立やネジ締めは、協働ロボットの代表的な用途です。人とロボットで作業を分担し、力のいる作業や繰り返しの作業をロボットが担うことで、作業者の負担を減らせます。外観検査や寸法測定の補助でも、ロボットがワークを保持・移動し、人や検査機器による確認を支える形で活用されています。
マシンテンディングは、工作機械などへワークをセット・取り出しする作業で、人手不足の工程として自動化のニーズが高い領域です。パレタイジング(積み付け)や梱包・ピッキング・搬送も、繰り返し作業として協働ロボットが得意とする用途です。
近年はアーク溶接などの分野でも導入が進んでおり、協働ロボットと組み合わせて条件設定を簡単に行えるようにした製品も登場しています。
さらに、画像処理AIと組み合わせて、ばら積みされた部品のピッキングや外観検査の精度を高める活用も広がっています。
業種別の導入事例
協働ロボットは、自動車・電子機器・食品・医療など多様な業種で導入が進んでいます。業種ごとに自動化したい工程は異なりますが、人手不足の解消と作業負担の軽減という目的は共通しています。
自動車分野では、トヨタ自動車の高岡工場で、ウインドウ搭載工程に人と協働するロボットを導入し、従来2名で行っていた作業を作業者1名とロボットによる体制に置き換えた事例が紹介されています。負担の大きい作業をロボットに、技能が必要な作業を人に振り分けた使い方です。
医療機器の分野でも導入が進んでいます。医療用分包機を製造するタカゾノでは、協働ロボットとパレットストレージを組み合わせて、製品の振り分け・積み込み・排出を行うシステムを導入した事例が公開されています。
関連メディアの記事では、この導入により作業者を6名から4名に減らし、肉体的負担の軽減と生産性向上につながったと紹介されています。
参考:経済産業省「平成29年度ロボット導入実証事業」、ニッケンつなぐ「協働ロボットとは|メーカーの動向と導入事例・市場シェア」
このほか、電子機器の組立工程や食品の包装ライン・物流のピッキング・パレタイジングなど、幅広い業種で導入が進んでいます。
主要な協働ロボットメーカーと選び方
協働ロボットは国内外の多くのメーカーから提供されており、メーカーごとに強みが異なります。製品の特徴を押さえたうえで、自社の用途に合うかどうかを比較することが大切です。
主要な協働ロボットメーカー
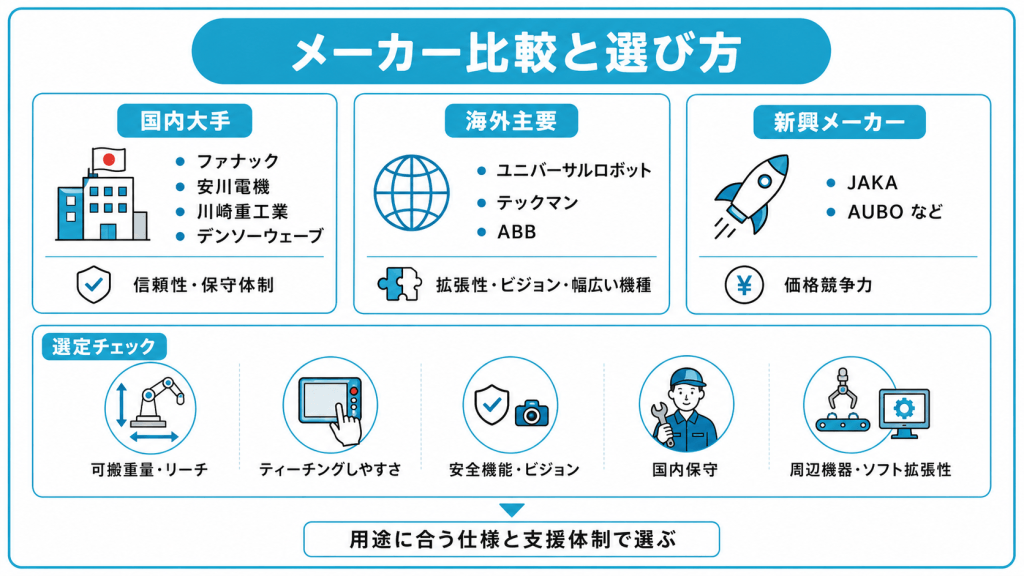
主要メーカーは、国内の総合ロボットメーカー・協働ロボットを得意とする海外メーカー・価格競争力で選択肢を広げる新興メーカーに大きく分かれます。
| メーカー | 主な特徴 | 代表的なシリーズ |
|---|---|---|
| ファナック | 国内大手・高い信頼性と保守体制 | CRシリーズ/CRXシリーズ |
| 安川電機 | 幅広い可搬重量帯・防塵防滴仕様 | MOTOMAN HCシリーズ |
| 川崎重工業 | 人の両腕のように動く双腕型 | duAro |
| デンソーウェーブ | 小型機種や高速人協働ロボットに強み | COBOTTA/COBOTTA PRO |
| ユニバーサルロボット | 協働ロボットの草分け・豊富な周辺機器 | URシリーズ/e-Series |
| テックマンロボット | カメラを標準搭載しAI連携に強み | TMシリーズ |
| ABB | 双腕型から単腕型まで幅広いラインナップ | YuMi/GoFaなど |
| 中国系メーカー(JAKA・AUBOなど) | 価格競争力やコストパフォーマンスを打ち出す | JAKA Zuシリーズ、AUBO iシリーズなど |
国内メーカーのファナックや安川電機は、産業用ロボットで培った技術と全国的な保守・サポート体制が強みです。部品供給やアフターサポートの面で安心感があり、組立から検査、パレタイジングまで幅広い工程に対応する製品をそろえています。
川崎重工業の双腕型やデンソーウェーブの小型・高速タイプなど、特徴のある製品も展開されています。
海外メーカーでは、ユニバーサルロボットが協働ロボットの草分けとして知られ、認定された周辺機器を組み合わせられる仕組みなど、拡張性の高さが特徴です。テックマンロボットはカメラを標準で搭載し、画像処理やAIとの連携を活かした使い方ができます。ABBは双腕型のYuMiや単腕型のGoFaなど、用途に応じた幅広いラインナップを持ちます。
中国系の新興メーカーは、価格競争力やコストパフォーマンスを打ち出すことで選択肢の幅を広げています。初期導入のコストを抑えたい現場では、検討候補のひとつになります。
なお、各メーカーの製品ラインや仕様は更新されるため、可搬重量や対応用途などの具体的な数値は、検討時に各社の公式情報で確認することをおすすめします。
協働ロボットの選び方
協働ロボットを選ぶ際は、主要な仕様(可搬重量・リーチ・繰り返し精度など)の比較に加えて、操作性や保守体制まで含めて検討することが重要です。
- 可搬重量とリーチが用途に合うか
- ティーチングのしやすさ
- 安全機能とビジョン連携の有無
- 国内の保守・サポート体制
- 周辺機器やソフトの拡張性
最初に確認したいのが、可搬重量とリーチ(アームの届く範囲)です。扱うワークの重さや作業範囲に対して能力が不足していると、そもそも作業を任せられません。逆に過剰な仕様はコスト増につながるため、用途に合った範囲を選ぶことが基本となります。あわせて、現場の作業者が設定しやすいかという操作性も重要です。
安全機能やカメラ(ビジョン)との連携の有無は、対応できる作業の幅に関わります。ばら積みされたワークのピッキングなどでは、ビジョン連携の有無が使い勝手を左右します。
さらに、故障時に部品をすぐ手配できるか、操作やメンテナンスを学べる体制があるかといった、国内での保守・サポート体制も確認しておきたい点です。周辺機器やソフトの拡張性が高ければ、用途の追加や変更にも対応しやすくなります。
協働ロボット導入の進め方とコスト
協働ロボットの導入では、ロボット本体の選定だけでなく、対象作業の選び方や費用計画も含めて検討する必要があります。
協働ロボット導入の進め方
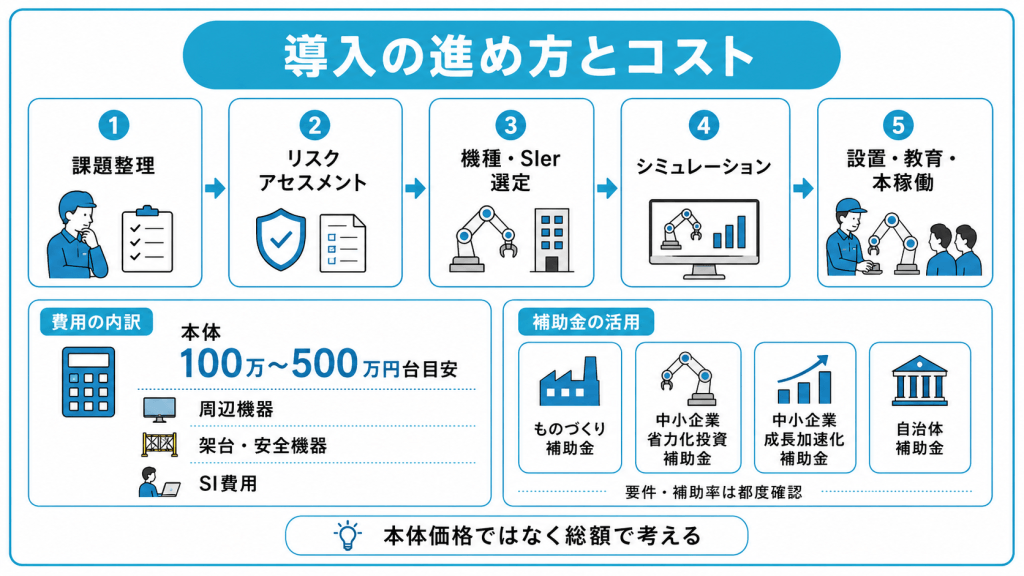
協働ロボットの導入は、自社の課題を明確にすることから始め、段階的に進める方が安全です。
- 自社の課題と対象作業を明確にする
- 対象作業のリスクアセスメントを行う
- ロボットとシステムインテグレーターを選定する
- シミュレーションで事前に検証する
- 設置・教育を経て本稼働させる
まずは人手不足や負担の大きい工程など、自社の課題と自動化したい対象作業を明確にしましょう。対象が定まったら、その作業に潜む危険を洗い出すリスクアセスメントを実施します。次に、用途に合うロボットと、システム構築を担うシステムインテグレーター(SIer)を選定します。
導入の前には、ロボットの動作や作業環境を仮想環境で再現するシミュレーションを行うと、設置後の動作不良やスペース不足といった問題を事前に見つけられます。その後、設置と作業者への教育を経て本稼働へ進みます。
費用の目安と補助金の活用
協働ロボットの費用は本体価格だけでなく、周辺機器やシステム構築を含めた総額で考える必要があり、補助金の活用も有効です。
協働ロボット本体の価格は、公開されている相場情報ではおおむね100万〜500万円台が目安とされます。ただし、メーカー公式サイトで価格が非公開の機種も多く、次のような要素によって導入の総額は大きく変わります。
- 可搬重量・リーチなどの基本仕様
- ビジョン(カメラ)やハンドなどの周辺機器
- 設置用の架台や安全機器
- システムインテグレーターによる構築費用(SI費用)
費用負担を抑える方法として、国や自治体の補助金の活用が挙げられます。
| 補助金 | 主な対象 |
|---|---|
| ものづくり補助金 | 革新的な製品・サービス開発を伴う設備投資 |
| 中小企業省力化投資補助金 | 人手不足対策の省力化設備(カタログ型・一般型) |
| 中小企業成長加速化補助金 | 売上高100億円を目指す中小企業等の大規模投資(成長計画の一部として活用) |
| 自治体独自の補助金 | 地域の製造業向けロボット導入支援 |
これらの補助金は、協働ロボットをはじめとする省力化設備の導入と相性が良いとされています。
ただし、いずれの補助金も事業計画の審査があり、申請したすべての企業が採択されるわけではありません。また、公募要件・上限額・補助率は年度や公募回ごとに変わります。
設備導入の検討と、最新情報を確認した上での補助金申請準備を同時に進めることをおすすめします。
まとめ
協働ロボットは、人と作業空間を共有しながら安全に作業できる産業用ロボットであり、人手不足や作業負担の課題を抱える製造現場を支える技術として導入が広がっています。リスクアセスメントなどで安全性を確認したうえで安全柵なしで設置できる場合があり、操作もしやすいことから、これまでロボット導入が難しかった中小規模の工場でも活用が進んでいます。
一方で、可搬重量や速度に制限があるため、単体での完全な無人化には向きません。また、安全に運用するにはリスクアセスメントが欠かせず、作業内容によっては特別教育の対象になる場合もあります。安全規格は2025年に大きく改訂されており、補助金の要件も年度ごとに変わるため、検討時には最新の情報を確認することが重要です。
導入を検討する際は、まず自社の課題と対象作業を明確にし、向き不向きを見極めたうえで、複数のメーカーや製品を比較するとよいでしょう。導入の進め方や費用、補助金については、メーカーやシステムインテグレーターに相談しながら計画を立てることで、自社の現場に合った形で協働ロボットを活用できます。
アイスマイリーでは、生成AIのサービス比較と企業一覧を無料配布しています。課題や目的に応じたサービスを比較検討できますので、ぜひこの機会にお問い合わせください。
よくある質問
協働ロボットと産業用ロボットの違いは何ですか?
最も大きな違いは、安全柵の要否です。協働ロボットは人との接触時に安全に停止する機能を備え、リスクアセスメントなどの条件を満たせば安全柵なしで設置できます。一方、従来の産業用ロボットは原則として安全柵が必要です。協働ロボットは省スペースで操作しやすく多品種少量生産に向き、産業用ロボットは大量生産や高速作業に向いています。
協働ロボットは英語で何といいますか?
英語では「Collaborative Robot」と表記し、「Cobot(コボット)」と略して呼ばれることもあります。「Collaborative」は「協働の」「協力的な」という意味で、人と協力して働くロボットであることを表しています。
協働ロボットの導入に特別教育は必要ですか?
「協働ロボットだから一律に不要」とは言い切れません。定格出力が80Wを超える産業用ロボットで、教示等・検査等の業務に従事する場合は、労働安全衛生規則に基づく特別教育の対象になります。協働ロボットであっても、定格出力や作業内容、可動範囲内での作業の有無を確認し、メーカーや専門機関に相談しながら対応を決めることが安全につながります。
協働ロボットの価格はどのくらいですか?
公開されている相場情報では、本体価格はおおむね100万〜500万円台が目安とされます。ただし、メーカー公式サイトで価格が非公開の機種も多く、可搬重量や周辺機器、システム構築(SI)費用によって総額は大きく変わります。本体価格だけで判断するのは難しいため、複数社から見積もりを取って比較することが大切です。
協働ロボットだけで工場を無人化できますか?
協働ロボットは人の作業を補助・代替する役割が中心であり、単体ですべての工程を完結させる無人化には向いていません。完全な無人化を目指す場合は、周辺設備や搬送装置・画像処理・安全防護・従来型の産業用ロボットなどとの組み合わせを検討する必要があります。
DXトレンドマガジン
メールマガジン登録
業務の課題解決に繋がる最新DX・情報をお届けいたします。
メールマガジンの配信をご希望の方は、下記フォームよりご登録ください。登録無料です。


AI・人工知能記事カテゴリ一覧
AI・人工知能サービス
- AIエージェント
- LLM
- AI研究開発
- ChatGPT
- 画像生成AI
- 生成AI
- RAG
- DX推進
- おすすめAI企業
- チャットボット
- ボイスボット
- 音声認識・翻訳・通訳
- 画像認識・画像解析
- 顔認証
- AI-OCR
- 外観検査
- 異常検知・予知保全
- 自然言語処理-NLP-
- 検索システム
- 感情認識・感情解析
- AIモデル作成
- 需要予測・ダイナミックプライシング
- AI人材育成・教育
- アノテーション
- AI学習データ作成
- エッジAI
- IoT
- JDLA
- G検定
- E資格
- PoC検証
- RPAツール
- Salesforce Einstein
- Watson(ワトソン)
- Web接客ツール
- サプライチェーン
- メタバース
- AR・VR・デジタルツイン
- MI
- スマートファクトリー
- データ活用・分析
- 機械学習
- ディープラーニング
- 強化学習
- テレワーク・リモートワーク
- マーケテイングオートメーション・MAツール
- マッチング
- レコメンド
- ロボット
- 予測
- 広告・クリエイティブ
- 営業支援・インサイドセールス
- 省人化
- 議事録自動作成
- 配送ルート最適化
- 非接触AI
業態業種別AI導入活用事例
今注目のカテゴリー
ChatGPT連携サービス
チャットボット
AI-OCR
生成AI
ChatGPT連携サービス
チャットボット
AI-OCR





FOLLOW US
SNSをフォローして、最新情報をチェックできます!
清水建設、鉄筋の加工・組立作業に「フィジカルAI」導入。スイスM…

Sakana AI、マルチエージェント基盤「Sakana Fug…
Microsoft、「Copilot Cowork」一般提供を開…
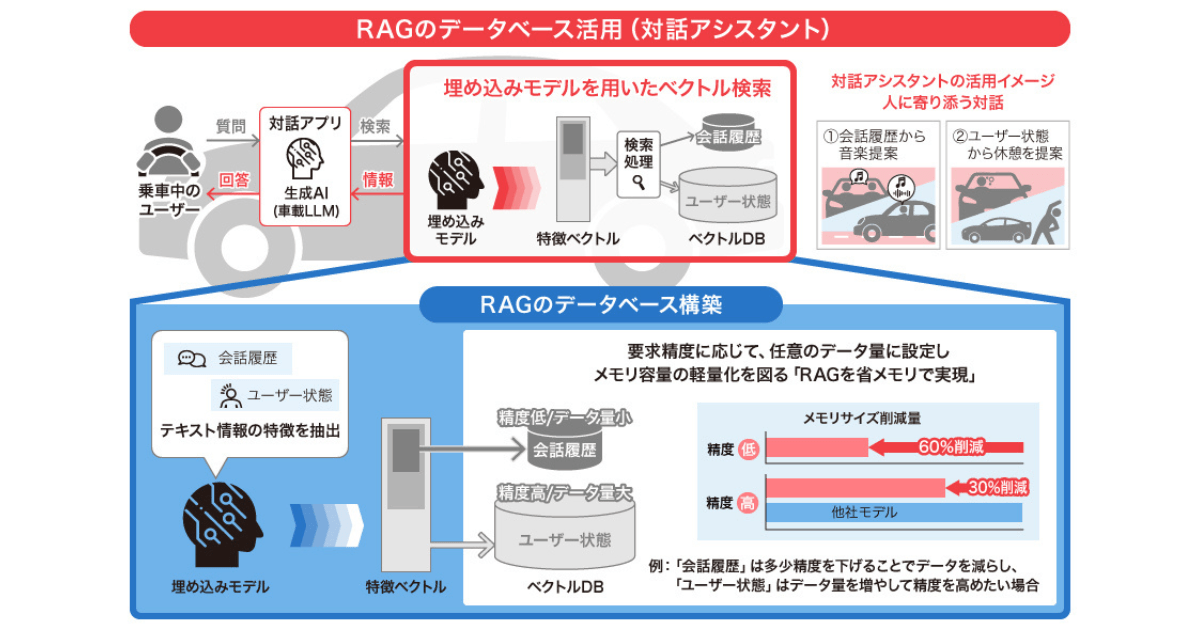
デンソーテン、独自の埋め込みモデル学習技術により車載エッジでRA…
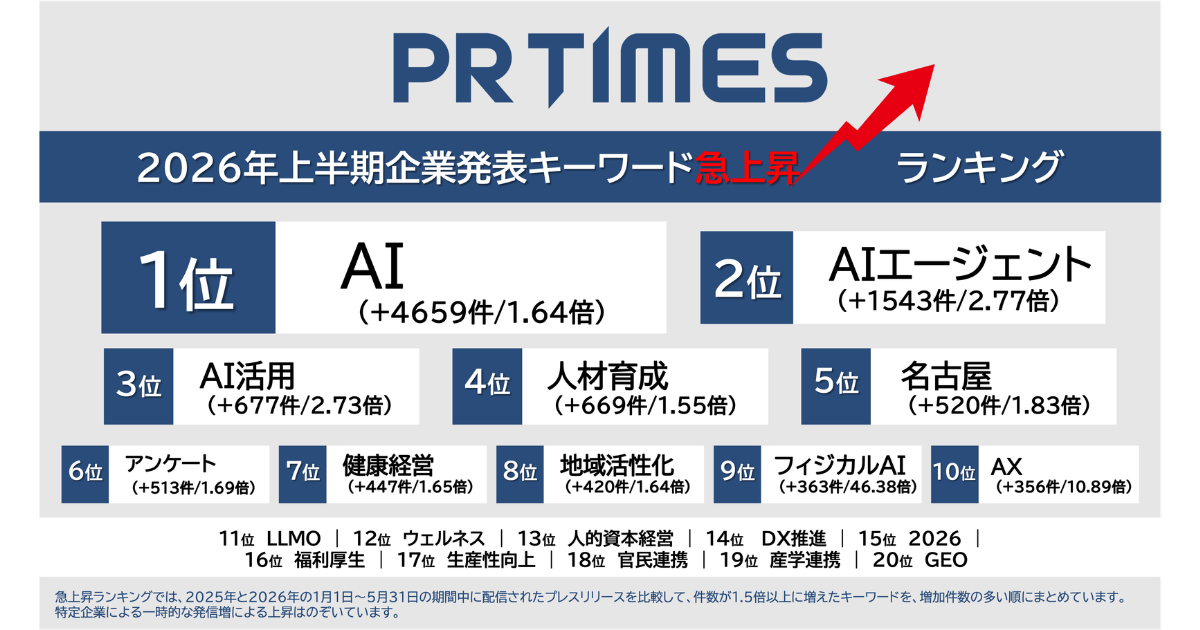
2026年上半期トレンドワードランキングをPR TIMESが公開。「AI」が初の総合1位、「フィジカルAI」は前年比46倍超

NECとJR東日本、「みどりの窓口AI対応サービス」の実現に向け実証実験を実施
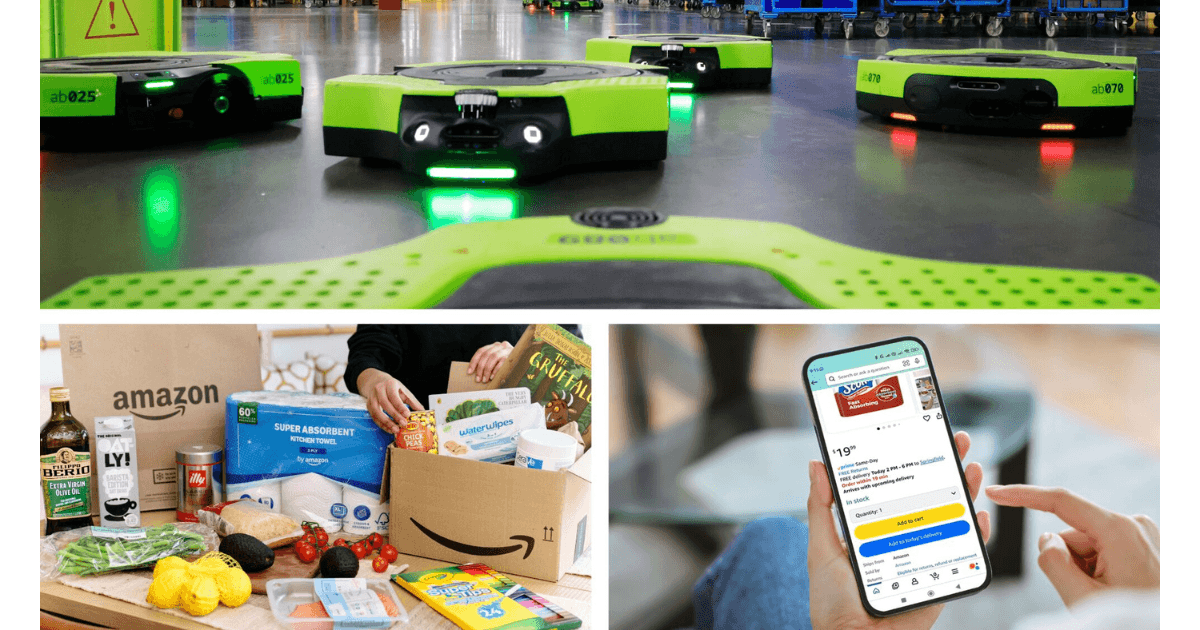
Amazon、欧州の物流へ100億ユーロ以上を投資。AIとロボットの活用で人材を支援し配送を迅速化

VLA(Vision-Language-Action)モデルとは?仕組み・VLMとの違い・主要モデルを解説
Copilotエージェントとは?できること・種類・作り方からセキュリティ・必要ライセンスまで徹底解説

Genki Global Dining Concepts、全生け簀へのAI給餌機導入で国産真鯛の安定供給を強化
AI製品・ソリューションの掲載を
希望される企業様はこちら